Robots que imitan a los lagartos para desplazarse por la arena
La ‘terradinamica’ explora la interacción de objetos en movimiento por sustratos sueltos o poco firmes, como la aerodinámica de ocupa del avance en el aire, o la hidrodinámica en el agua
¿Qué forma debe tener un robot especializado en desplazarse por la arena? ¿Cómo deben ser sus patas? Unos investigadores estadounidenses, dispuestos a abrir un nuevo campo de investigación, que ellos llaman terradinámica, se han propuesto dar respuesta a estas preguntas de la mano de las simulaciones por ordenador y la observación de animales, como los lagartos que se mueven por la arena del desierto. Las patas convexas con forma de C confieren rapidez a los artefactos, mientras que las extremidades curvas o cóncavas funcionan peor, concluyen. Además, han construido un pequeño robot de seis patas que camina eficazmente sobre ese tipo de superficie. Estos trabajos deben ayudar a diseñar, por ejemplo, robots para la exploración de Marte.
La interacción de los robots con sustratos sueltos o poco firmes, como la arena, la grava, el barro o la hierba, puede ser más compleja que el desplazamiento por fluidos, ya sea el aire o el agua, explican Daniel Goldman, Chen Li y Tingnan Zhang, del Instituto de Tecnología de Georgia. Teniendo en cuenta la elevación y el arrastre de cada pata de un robot y la forma en que entra y sale de esos materiales, los investigadores han desarrollado ecuaciones que permiten describir y predecir el tipo de movimiento de los robots con patas en la terradinámica. Lo han explicado con detalle en la revista Science. “Ahora tenemos las herramientas para comprender el movimiento de los vehículos con patas sobre arena suelta de la misma manera que los científicos e ingenieros tienen herramientas para comprender la aerodinámica y la hidrodinámica”, afirman. “Estas herramientas nos permitirán diseñar y simular los robots con patas no sólo para predecir su rendimiento, sino también para optimizar diseños y crear nuevos conceptos”.
Los robots móviles de exploración de Marte, hasta ahora, van sobre ruedas para recorrer terrenos que en muchos tramos son roca o tierra dura, pero también se encuentran con arena (y los vehículos Spirit y Opportunity, de la NASA, se encontraron con situaciones difíciles al atascarse en arenales del planeta rojo). También se utilizan las ruedas en muchos robots autónomos para trabajar en sitios peligrosos. Pero si estas máquinas se reducen de tamaño, puede que a los ingenieros les convenga buscar modos alternativos de locomoción, señalan los investigadores de Georgia.
“Hemos descubierto que las fuerzas que afectan a este tipo de locomoción son genéricas en diversos medios granulados, ya sean semillas de plantas, bolas de cristal o arena”, explica Li, en un comunicado del Instituto de Tecnología de Georgia.
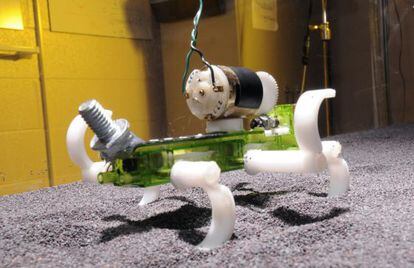
En sus experimentos prácticos, Goldman, Li y sus colegas, han desarrollado un robot de seis patas, de 13 centímetros de largo y unos 150 graos de peso, que podría resultar útil en labores de reconocimiento, en la Tierra o en Marte.